不二越 / ロボットオプション / 小型視覚装置 NVsmart
ロボット
本文
小型視覚装置 NVsmart

|
●省スペース
|
カメラ、照明、画像処理装置を一体化 〜省スペース〜
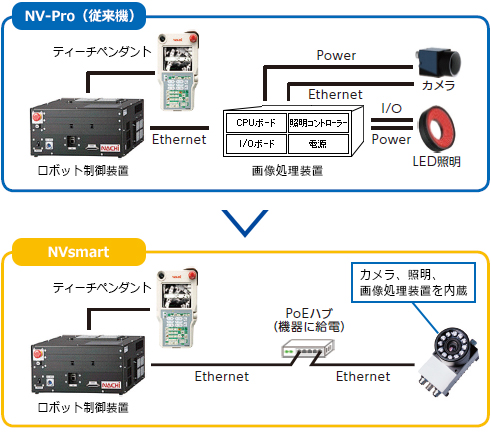
カメラ、照明、画像処理装置(サイズ)を一体化することで省スペース化を実現。
設置場所を選ばず、柔軟なレイアウトを実現できます。
簡単セットアップ 〜立ち上げ時間を短縮〜
省配線
カメラ、照明、画像処理装置を一体化することで省配線化
従来は、カメラ・照明とロボット制御装置および画像処理装置を接続するための配線が複数あったが、Ethernetケーブルのみで接続可能に
簡単キャリブレーション機能
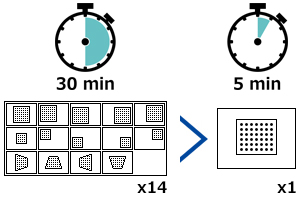
従来は10枚以上必要だったキャリブレーションは1枚で可能となり、
キャリブレーションにかかる時間を大幅に削減
豊富なアプリケーション 〜幅広い用途へ対応〜
位置姿勢検出

様々なワークが混在した場合でも、姿勢を正しく認識
(例)コネクタの挿入作業
ブロブ
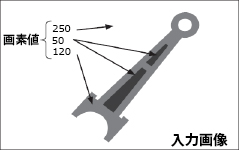


入力画像を白黒2色の画像へ変換(2値化)し、ワークの有無、位置、数、形状、向きなどの形状特徴を解析

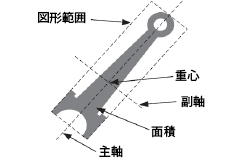
位置姿勢検出でワークの輪郭が安定しない場合にブロブ機能が有効
(例)金属部品のピッキング
検査
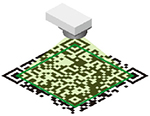
①バーコード、QRコード認識
QRリーダ等追加の機器が不要でバーコード、QRコードを認識
(例)コードを活用したトレーサビリティシステムの構築
②長さ、円型計測
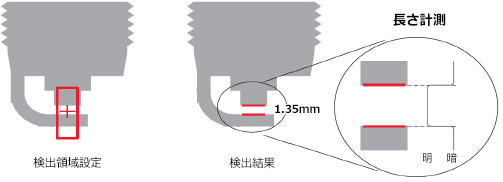
ワークのエッジ間の長さを計測
(例)外観検査
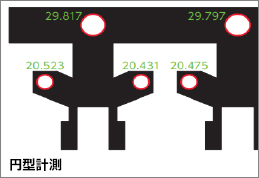
画像中の円もしくは楕円を抽出し、径を計測
処理速度が従来比2.5倍に向上 〜サイクルタイムの短縮〜
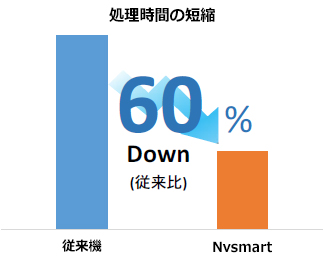
処理速度が従来比2.5倍に向上しており、処理時間を60%短縮
サイクルタイムの短縮に貢献
適用事例

コネクタの挿入作業
ねじ締め作業